High performue CPU, 1ms high response
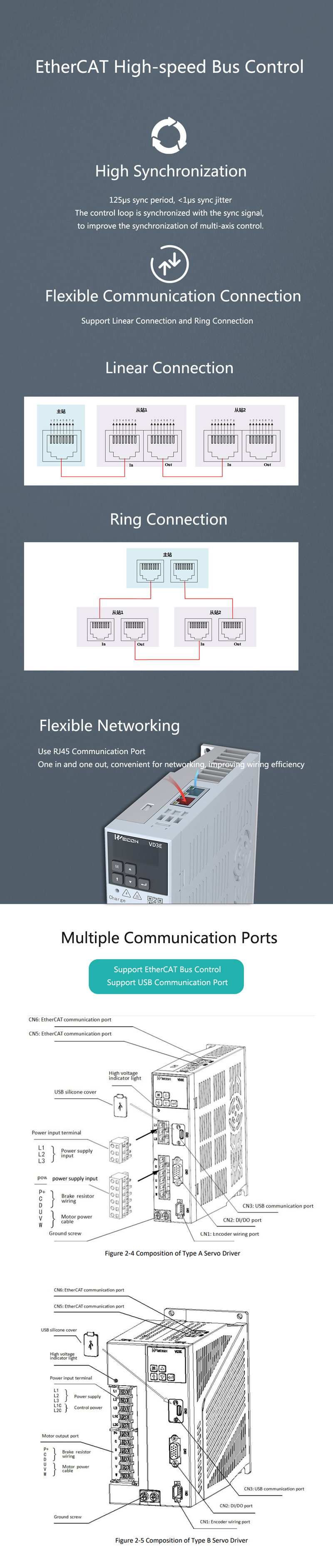
EtherCAT High-speed Bus Control
Real-time / High Precision/ Easy Wiring / Anti-interference
LX6V PLC with 1 Ethernet port and 1 EtherCAT port can connect up to 128pcs servos.
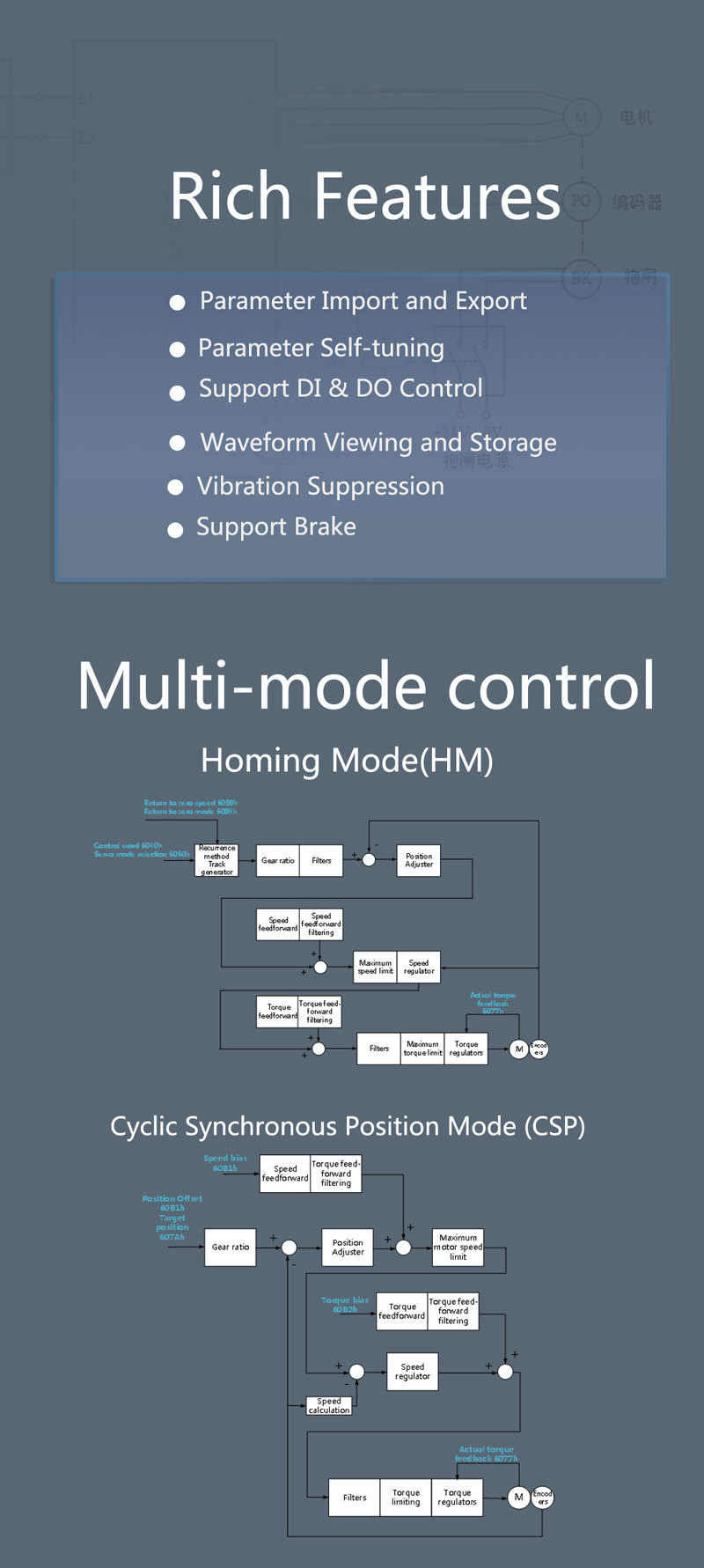
Support Homing Mode and Cyclic Synchronous Position Mode

Flange Size | Motor Model | Drive Model | Rated Torque (N.m) | Rated Speed (rpm) | Voltage |
40 | WD40M-01030S-A1F | VD3E-010SA1G | 0.318 | 3000 | 220V |
60 | WD60M-02030S-A1F-L
| VD3E-010SA1G | 0.64 | 3000 | 220V |
60 | WD60M-04030S-A1F
| VD3E-010SA1G | 1.27 | 3000 | 220V |
60 | WD60M-04030S-A1F-L
| VD3E-010SA1G | 1.27 | 3000 | 220V |
80 | WD80M-07530S-A1F
| VD3E-014SA1G | 2.39 | 3000 | 220V |
80 | WD80M-07530S-A1F-L
| VD3E-014SA1G | 2.39 | 3000 | 220V |
Flange Size | Motor Model | Drive Model | Rated Torque (N.m) | Rated Speed (rpm) | Voltage |
60 | WD60M-02030S-C1F-L
| VD3E-010SA1G | 0.64 | 3000 | 220V |
60 | WD60M-04030S-C1F
| VD3E-010SA1G | 1.27 | 3000 | 220V |
60 | WD60M-04030S-C1F-L
| VD3E-010SA1G | 1.27 | 3000 | 220V |
80 | WD80M-07530S-C1F
| VD3E-014SA1G | 2.39 | 3000 | 220V |
80 | WD80M-07530S-C1F-L
| VD3E-014SA1G | 2.39 | 3000 | 220V |
VD3E 23 bit Absolute Multi Optical Encoder
Flange Size | Motor Model | Drive Model | Rated Torque (N.m) | Rated Speed (rpm) | Voltage |
60 | WD60M-02030S-D2F-L
| VD3E-010SA1G | 0.64 | 3000 | 220V |
60 | WD60M-04030S-D2F
| VD3E-010SA1G | 1.27 | 3000 | 220V |
60 | WD60M-04030S-D2F-L
| VD3E-010SA1G | 1.27 | 3000 | 220V |
80 | WD80M-07530S-D2F
| VD3E-014SA1G | 2.39 | 3000 | 220V |
80 | WD80M-07530S-D2F-L
| VD3E-014SA1G | 2.39 | 3000 | 220V |
Basic Specifications | Control Method | IGBT PWM control sine wave current drive | |
Encoder Feedback | 17bit/23bit absolute encoder | ||
Control Signal Input | 6 DI inputs, select the input function according to the function code configuration | ||
Control Signal Output | 3 DO outputs, select the output function according to the function code configuration | ||
Communication | USB interface. Function code parameter setting, status monitoring, waveform viewing, parameter self-tuning, etc. can be performed through upper computer | ||
Braking Resistor | Built-in braking resistor, support external braking resistor | ||
General Function | Automatic Parameter Tuning | Automatic load inertia identification, automatic rigidity level and parameter self-tuning can be carried out through the cooperation of the upper computer | |
Waveform View | The waveform of data such as real-time speed/torque/position deviation can be observed through the host computer | ||
Waveform Storage | The waveform acquisition frequency is 1KHz, and the original waveform data can be saved up to 10s | ||
Parameter import and export | Support batch parameter import and export; support SDO download | ||
Vbration Suppression | Mechanical vibration can be suppressed by setting vibration suppression parameters | ||
Protective Function | Overvoltage, undervoltage, overcurrent, overspeed, overload, overheating, encoder failure, excessive position deviation, torque limit, speed limit, etc. | ||
Brake | Support output control | ||
Universal Control DI input | Servo enable (SON), fault and warning clear (A-CLR), forward drive prohibition (POT), reverse drive prohibition (NOT), emergency stop (E-STOP) | ||
General Control DO Output | servo ready(RDY), fault signal (ALM), warning signal (WARN), rotation detection (TGON), zero speed signal (ZSP), torque limit (T-LIMIT), speed limit (V- LIMIT), servo open state output (SRV-ST), servo brake output (BRK-OFF), communication VDO | ||
EtherCAT | Communication Protocol | EtherCAT protocol | |
Support Service | CoE(PDO,SDO) | ||
Synchronously | DC-distributed clock | ||
physical layer | 100BASE-TX | ||
Baud rate | 100 Mbit/s(100Base-TX) | ||
Duplex Mode | full duplex | ||
Topology | circular, linear | ||
Transmission medium | Shielded Cat 5e or better network cable. | ||
Transmission distance | The distance between two nodes is less than 100M (the environment is good and the cable is good). | ||
Number of Slave Stations | The protocol supports up to 65535, and the actual use does not exceed 100. | ||
Frame Length | 44 bytes~1498 bytes | ||
Process Data | A single Ethernet frame is up to 1486 bytes. | ||
Sync Jitter | <1us | ||
Distributed Clock | 64 bit | ||
EEPROM Capacity | 8kbit initialization data is written by the EtherCAT master station | ||
Control Mode | CSP、HM | ||
Sync Cycle | 125μs | ||