This project uses Wecon Codesys PLC LX6C and bus type servo VD3E for parallel robot control. Through simple debugging, the point-to-point interpolation motion of the delta robot is realized.

 LX6C |  VD3E Servo |
| NAME | QUANTITY |
|---|---|
| LX6C-0808MT-DD | 1 |
| VD3E-014SA1G | 3 |
| WE80M-07530S-A1F | 3 |
| Upper arm | 3 |
| Lower arm | 6 |
| Motor shaft connector | 3 |
| Top plate | 1 |
| Tool plate | 1 |
| Hexagon socket screws | 6 (M4 and M5) |
|
|
|
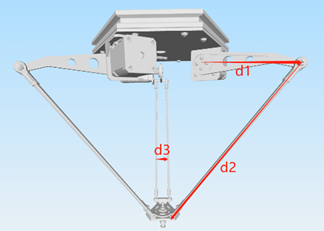
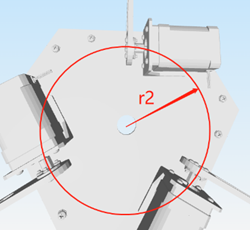
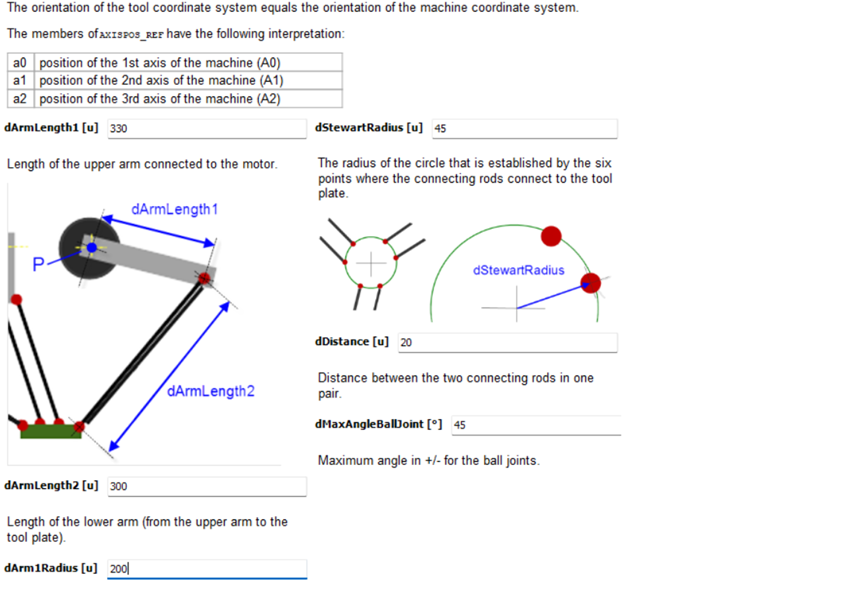
Length of the upper arm d1: 330mm
Length of the lower arm d2: 600mm
Distance between lower arm in one pair d3: 20mm
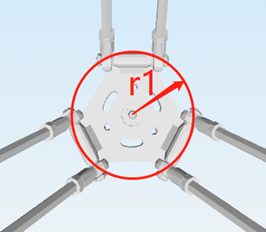
Radius of circle where lower arm contact point is located r1: 50mm
Radius of circle where motor shaft is located r2: 100mm
Maximum angle in ± for ball joints: 60°
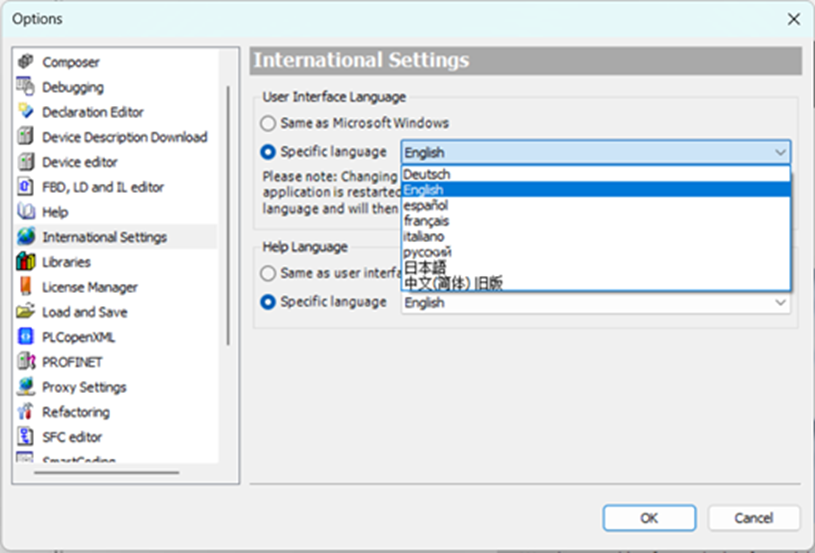
Select “Tools”-->“Options”
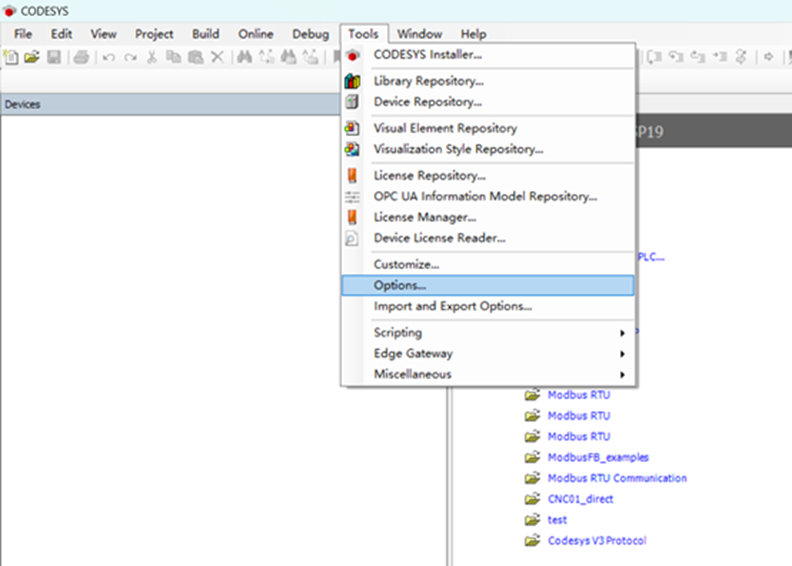
Set software language in “International Settings”
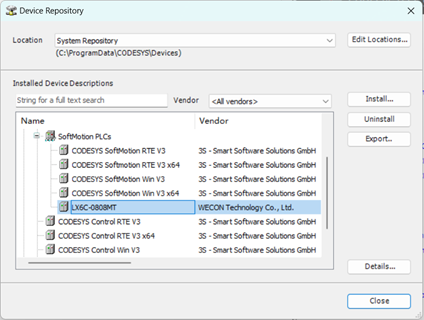
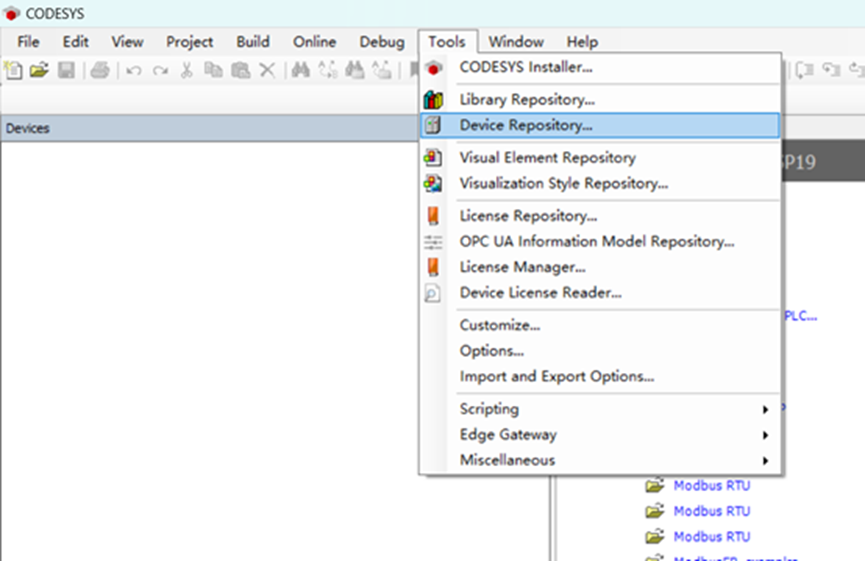
Select “Tools“-->“Device Repository“
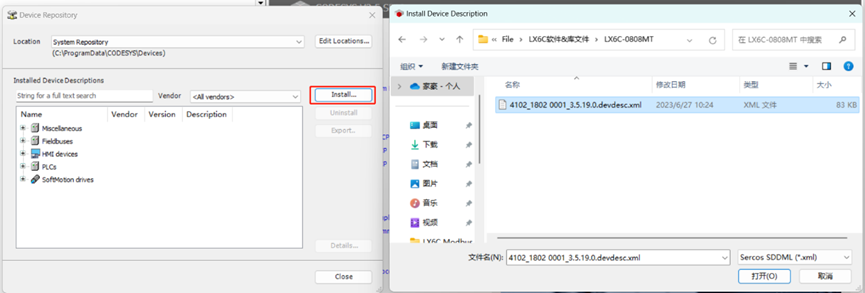
Install LX6C xml file.
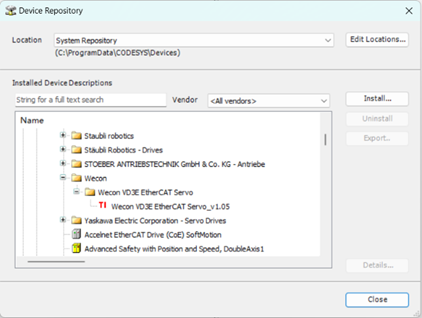
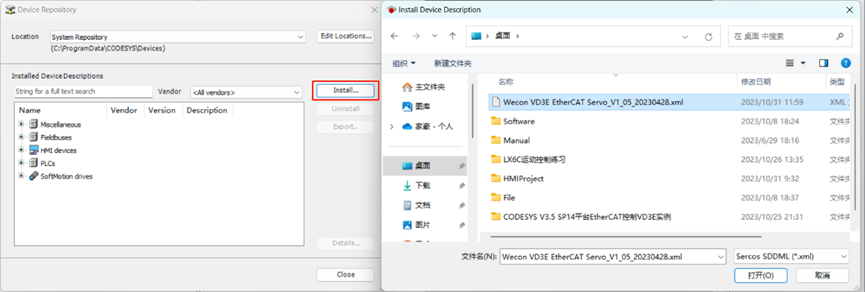
Install VD3E xml file.
|
|
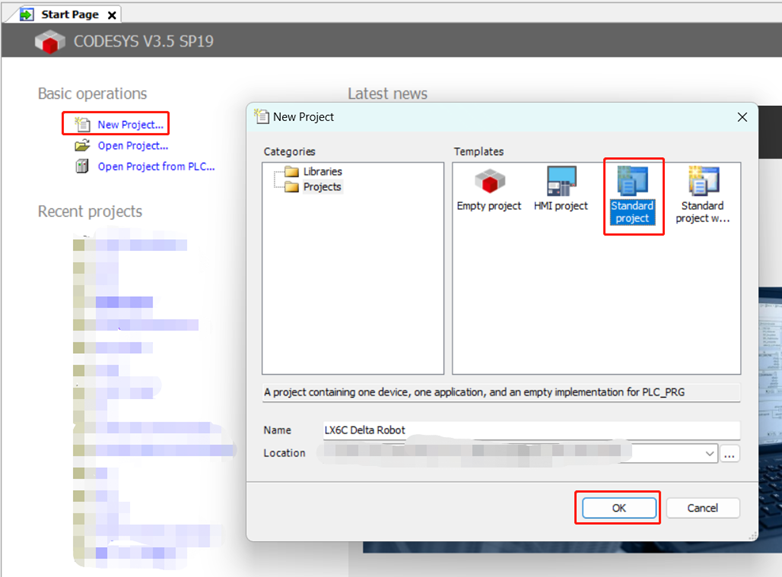
Create a new standard project
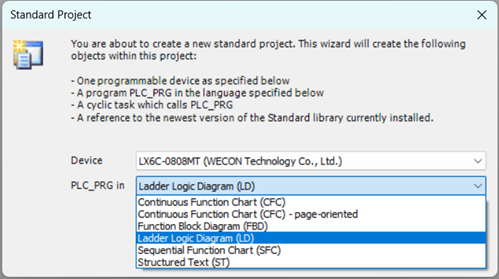
Select device and programming language
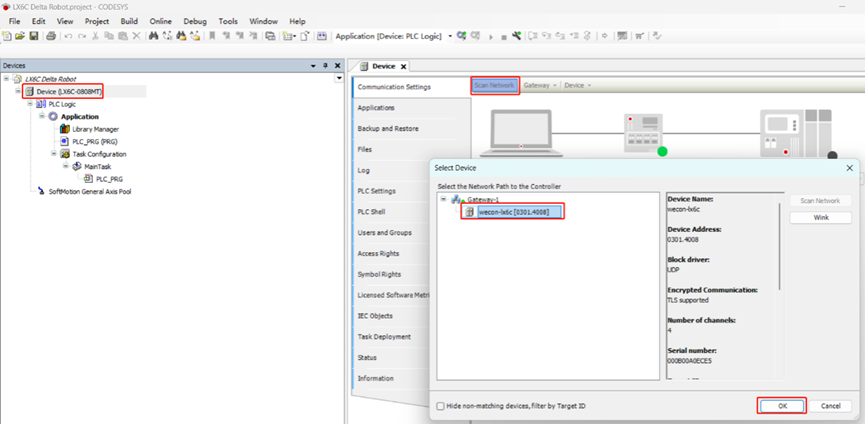
Double click “Device” and select Scan Network
Select LX6C and click OK, make sure your PC and LX6C in the same LAN (LX6C default IP is 192.168.8.8)
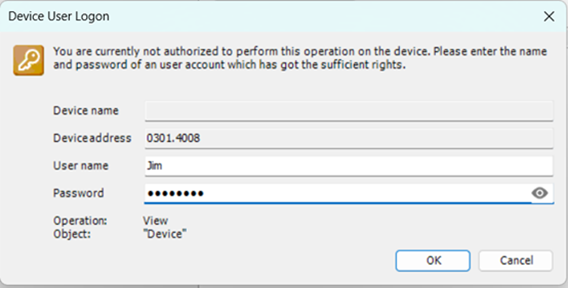
Login device with account and password
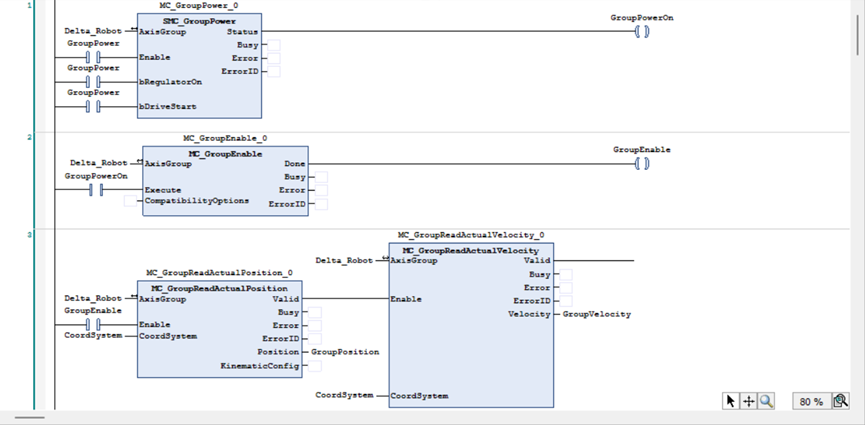
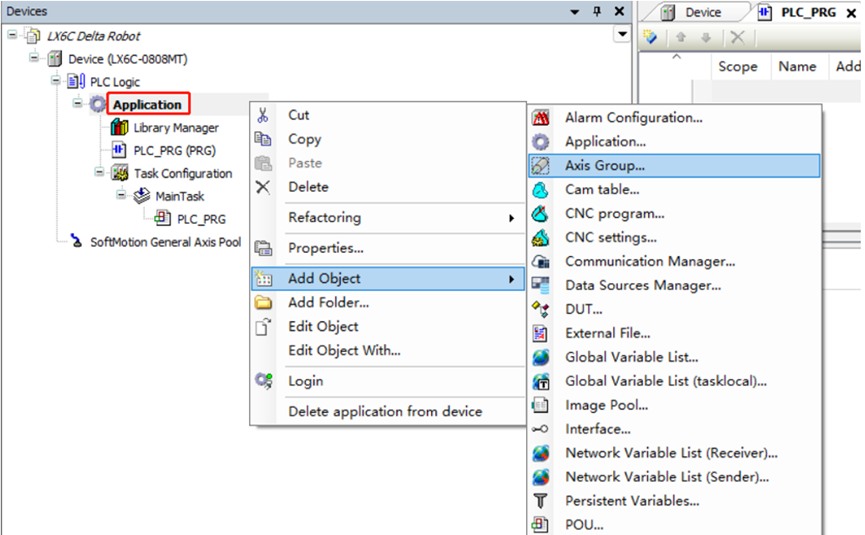
Right click Application, “Add Object” and select “Axis Group”
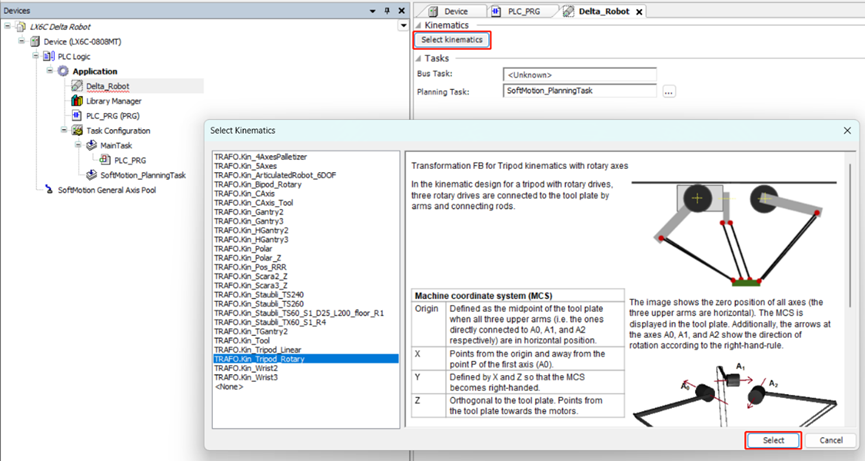
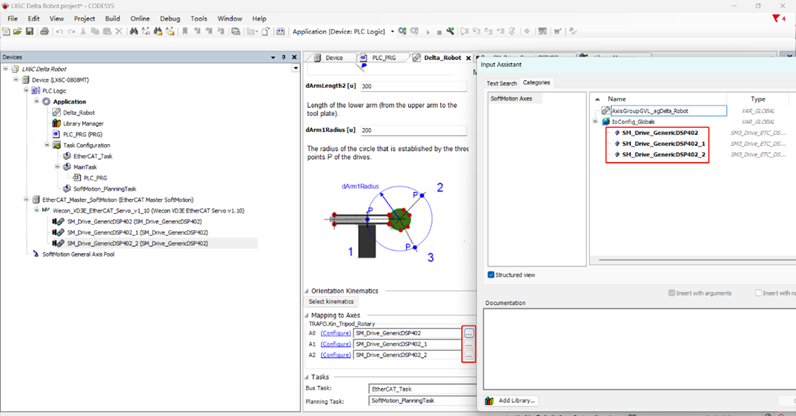
Click “Select Kinematics” and select “TRAFO.Kin_Tripod_Rotary”
Fill in the mechanical parameters (Use the same user units)
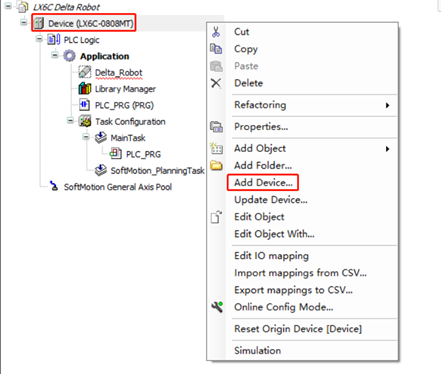
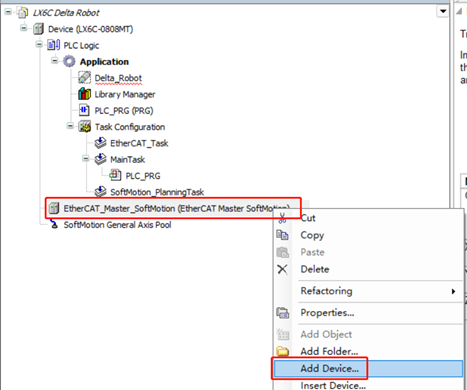
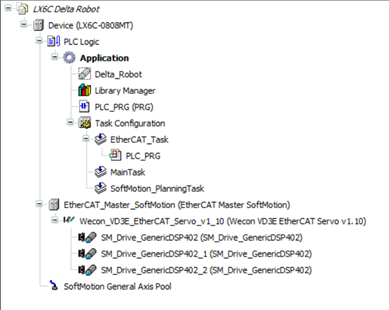
Right click “Device” and add device
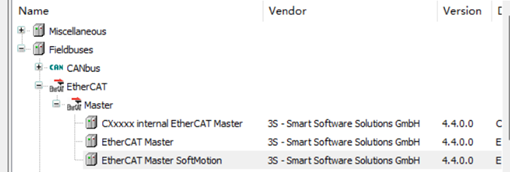
Add “EtherCAT Master SoftMotion”
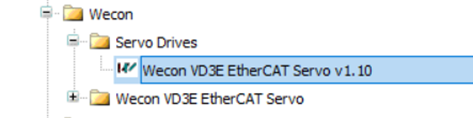
Right click “EtherCAT_Master_SoftMotion” and add device, select “Wecon VD3E EtherCAT Servo_v1.10” (Servo xml file should be same with servo firmware, you can check servo firmware in U2-04 through servo panel)
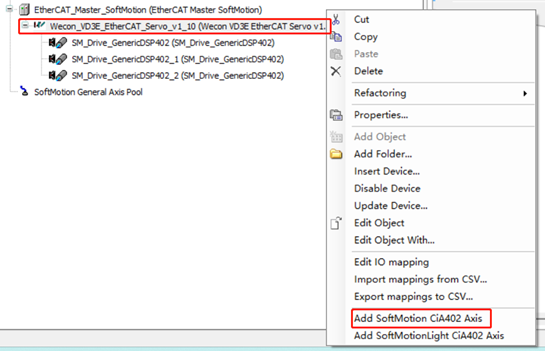
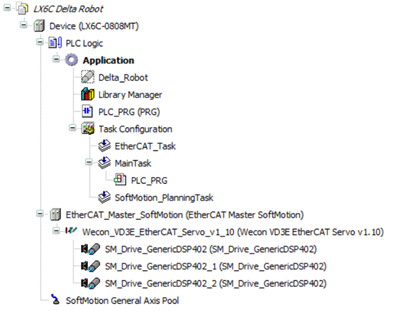
Add 3 motion axis
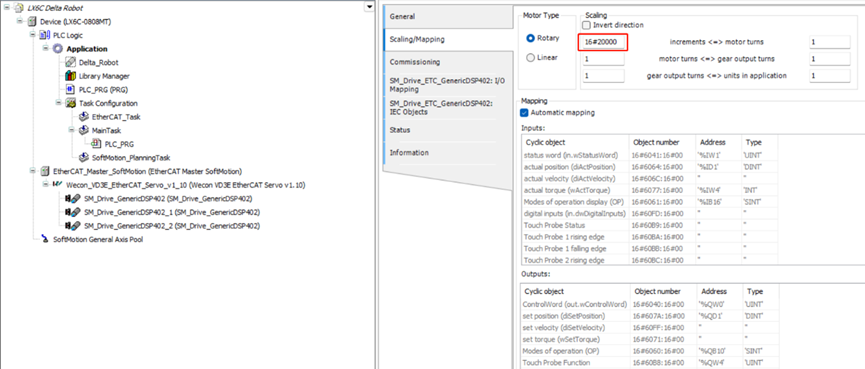
Set the correct resolution based on the motor encoder
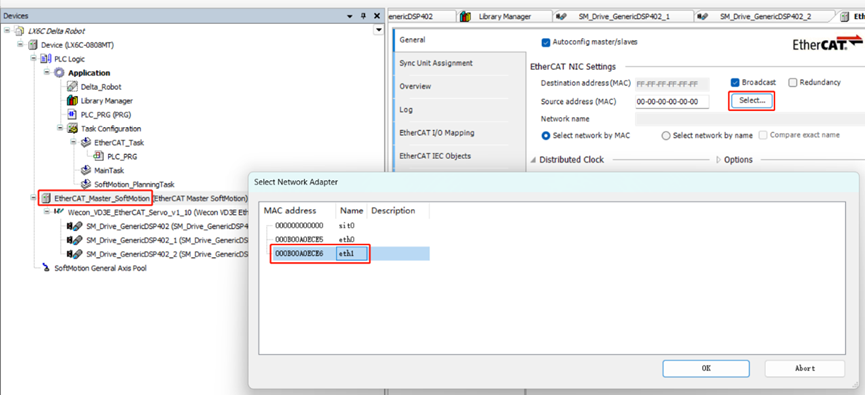
Double click “EtherCAT_Master_SoftMotion” and select network name “eth1” in “General”
Bind axis to robot.
Move “PLC_PRG” from “MainTask” to “EtherCAT_Task”
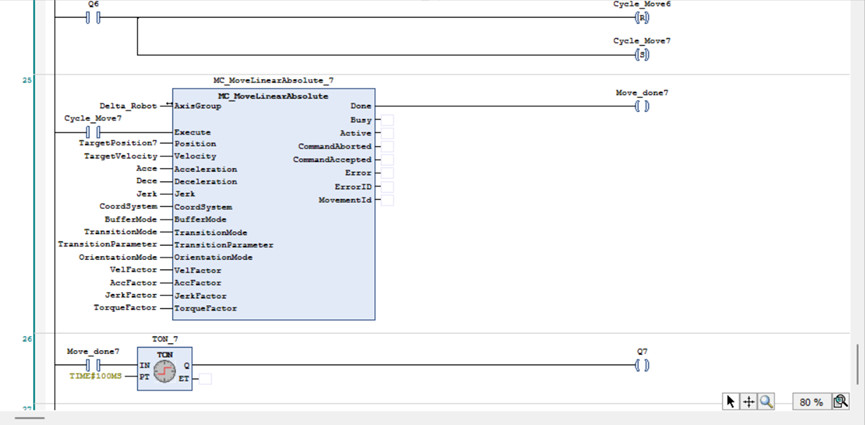
Build a simple program for absolute move